
1. Giriş
Endüstri 4.0'ın gelişmesiyle birlikte nesnelerin birbirleri ile haberleşmesi ve birbirlerini kontrol edebilme yetenekleri de gelişmiştir.[1] Bu gelişme seri haberleşme birimleri ile başlamış kablosuz sistemlerinde eklenmesiyle kullanıcılara nerdeyse her yerden nesneleri kontrol etme şansı sunmuştur. Bu konuda uluslararası çapta bir güvene sahip olan KNX standardı ile Makel olarak bizde bu alandaki gelişime katkıda bulunmak istedik. KNX protokolü, özellikle Avrupa’da ev ve bina otomasyon sistemleri alanında en yaygın kullanılan otomasyon protokolüdür. Makel olarak da bu çalışmamız KNX standardına olan ilgimizi, bu teknolojide Makel Şirketler Grubu olarak yer aldığımızı göstermektedir. Daha önce global olarak yaptığımız GresBas projesi ile akıllı ev sistemlerinde enerjinin yönetimine katkıda bulunmuştuk artık bu proje ile akıllı ev otomasyon ürünlerinin maaliyetinde ve enerji kullanımlarında da azalma olacaktır. Bizi bu çalışmaya yönlendiren çalışma ise Lee ve Hong' un 2008'de yaptığı çalışmada ZigBee anteni entegre edilmiş ve KNX d.nüştürücü ile beraber kullanıcıya sunularak bu olasılığın gerçekleşebileceği gözler önüne serilmiştir. Bu çalışmadan yola çıkarak farklı kablosuz haberleşme sistemlerinin de bu otomasyon sistemlerine entegre edilmesi kaçınılmazdır. Bu çalışmamızda da ev otomasyon sistemlerine diğer bir kablosuz haberleşme türevi olan bluetooth ekledik. Kısaca bu sistemle birden fazla modülün tek bir işlemci üzerinden kontrol etmeye çalıştık. Bunun için bir kontrol bir de sürücü devre tasarımı üzerinden ilerledik.
2. Bluetooth
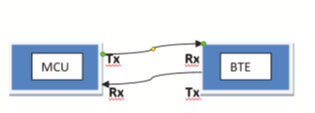
Bluetooth modülleri belli bir frekansta yayın yapabilen, mikro işlemciyle olan haberleşmesini de UART portları üzerinden geçekleştiren modüllerdir. UART haberleşmesi seri haberleşme protokollerinden biridir. Bu şekilde haberleşebilmek için (iki kanalında referans değerinin doğru alınabilmesi için) aynı toprak kaynağına bağlanması ve haberleşme bant genişliğinin aynı seçilmesi gerekmektedir. Oluşturulan sinyalin ne kadar mesafe gideceği ise temel olarak antenin sinyal çıkış gücüne bağlıdır. Bu tanım ise aşağıdaki şekilde hesaplanabilir.
Yol Zayıflaması (dB) = 20.log10(Frekans, MHz) + 20.log10(Mesafe, Metre)
- 27.55 f.1
Bu denkleme göre düşük frekansta iletilen sinyaller daha uzun mesafe gitmekle beraber sinyal çıkış gücü de esas ölçütlerden biridir.
3) Kontrol Devresi
Kontrol devresinde kullanıcının kolaylıkla anlayabileceği ve kullanabileceği ekipmanlar olması gerekmektedir. Bunun için donanımsal olarak buton koymak en kullanışlı yol olacaktır. Bu butonlara atanacak fonksiyonlar ise yazılımcı tarafından geliştirilmelidir. Bizim çalışmamızın konusu ise sürücü devresini tek bir işlemci ile kontrol etmek. Bunu yapabilmek için elimizdeki işlemcilerin öncelikle çevresel birimlerinin neler olduğunu ve kaç tane olduğunu bilmemiz gerekir. Bizim çalışmamızda kontrol edilecek olan ü. farklı sistem: DC motor hız kontrol devresi, servo motor ve LED ışığı. Bu üç farklı mekanizmayı da aynı çevresel birim ile kontrol edebiliriz. Bu çevresel birimimiz ise Darbe Genişlik Modülasyonu olacaktır. Bu modülasyona göre DC motorunun hızını servo motorunun açısını ve LED in parlaklığını kontrol edebiliriz.
3.1 Darbe Genlik Modülasyonu
Pulse Width Modulation (PWM) mikroişlemci tarafından gelen kare dalga sinyalin genliğini değiştirmeden darbe süresi üzerinde işlem yaparak mikroişlemci çıkışında (mosfet girişi) g.rülen sinyalin DC olarak değiştirilmesini sağlar.[3] Bunu şekil.2 ile daha rahat gösterebiliriz.
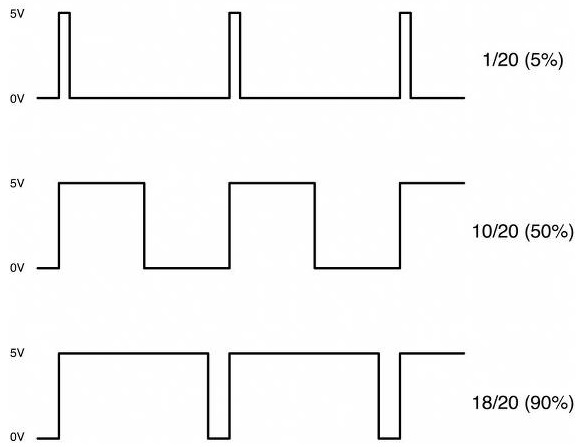
Şekilde verilen sinyalin hareketine sürücü devrenin bir süre çalışıp bir süre de devre dışı olarak kalacağını düşünebiliriz. Fakat bu sinyalin periyodu çok düşük mertebelere indiğinde yani frekansı yeterince yükseldiğinde çalışma süresinin periyoda oranı ile çıkışta ölçülecek olan DC genliğin maksimum genliğe oranı eşit olacaktır. Bu bize stabil bir sürüş sağlar. Bu durumda kontrol devresi ise aşağıdaki gibi olabilir.
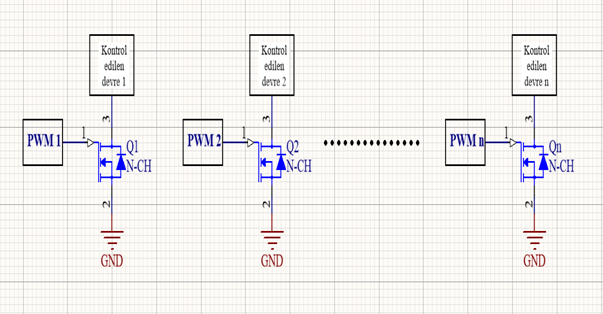
Şekil 3' e göre n değeri mikroişlemcimizin timer kanal sayısına bağlı olarak değiştirilebilir.( Hatırlatmak gerekir ki bizim çalışmamız gereği olarak PWM kontrollü devre çizimi gerçekleştirilmiştir. Mikroişlemcilerde kontrol amaçlı farklı çıkışlar da verilebilir. ) PWM den gelen değere göre mosfet'in Gate-Source gerilim farkı kontrol edilmekte ve bu gerilim değerine bağlı olarak da kontrol edilen devrenin üzerinden geçen akım değiştirilebilmektedir.
F.2 fonksiyonu göz .nüne alındığında drain üzerinden geçecek olan akım Vgs'ye bağlı olarak nonlinear bir şekilde artacaktır.
4.Veri iletimi
İki devre kartı üzerinden haberleşme sağlanırken kablosuz yayın kullanılacaktır. İletilecek olan paketi yalın bir şekilde iletmek alıcıda veri eksikliğine neden olacaktır. Birden fazla modül kontrolü sağlandığı için belirtilen datanın hangi devreye ait olduğunun da belirtilmesi gerekir. Bu isteri sağlayabilmek adına verilen data ile beraber modülü ifade ettiğini belirten ID de ekleyeceğiz. Bu durumda tek bir veri değil bir data frame olarak gönderilmesi gerekir.[4] Bu bilgiler iletilirken tek bir paket hallinde iletilmesi ise hem bilgi güvenliği hem de işlemcinin sağlıklı çalışma süresi açısından önemlidir. Bu bakımdan data paketi aşağıdaki gibi olması gerekir.
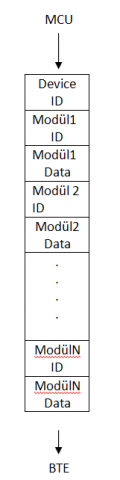
Bu aşamada karşımıza çıkacak diğer sorun veri gönderiminin ne zaman sonlanacağı veya data uzunluğunu ne kadar olacağıdır. Bunu kontrol etmek içi UART Tx kesme kullanılacaktır. Bu sayede UART verisi geldikçe datanın sonuna eklenebilecektir. Datayı gönderen işlemci tarafında buffer a veri eklenirken bir sayıcı ile öğrenmesi kolay olacaktır.
5. Nerde Kullanılacak
Bu çalışma ile Makel bünyesinde bulunan KNX cihazlarının çoklu modül olarak üretilmesi sağlanabilir. Bluetooth ile çalışılabilecek modüllerin geliştirilmesi ve çoğaltılmasında kullanılabilecektir. Kontrol mekanizmasının değiştirilmesi ile farklı türde modüller de kontrol edilebilir. Özellikle grup prizler başta olmak üzere diğer modüllerin çoklanmasında kullanılacaktır.
6. İleride Evrilebileceği Çalışmalar
Bu çalışma haberleşme yöntemi olarak kablosuz gerçekleştirilmiştir. Bu bağlamda yine kablosuz haberleşme yöntemlerinden Wi-Fi haberleşmesi ile gerçekleştirilebilir. Aynı zamanda modüllerin çoklanma yöntemi ve kontrolü olarak da PWM seçilmiştir. İleriki çalışmalarda bu kontrol yöntemi ADC , GPIO ve benzeri çevresel birimlerle kontrolü çalışılabilir. Bu çalışmamız Makel şirketler grubunun daha önce de yaptığı GresBas projesi ile birleştirilerek mevcut enerji kullanımında daha fazla tasarruf sağlanabilir.
7. Sonuç:
Kablosuz haberleşme üzerine çalışmalardan yola çıkarak bluetooth ile data gönderim metodu geliştirdik ve bu metodu KNX modüllerine eklemeyi planladık. Bluetooth modülleri ile veri iletiminin nasıl olması gerektiğini ve frame yapısını açıkladık. Birden fazla modülü tek bir işlemci ile kontrol ederek maaliyet düşürümü ve ulaşılabilirlik sağladık. Kumanda devresi ve sürücü devrenin prototipleri üzerine temel çalışmaları, çizimleri gösterdik. Bu çalışmanın ilerde ne düzeyde çalışmalara ön ayak olabileceği üzerine tartıştık.
8.Kaynakça
[1] Ghobakhloo, M. (2020) “Industry 4.0, digitization, and opportunities for Sustainability,” Journal of Cleaner Production, 252, p. 119869.
[2] Woo Suk Lee and Hong, S.H. (2009) “Implementation of a KNX-zigbee gateway for home automation,” 2009 IEEE 13th International Symposium on Consumer Electronics [Preprint].
[3] Yu, Z., Mohammed, A. and Panahi, I. (1997) “A review of three PWM techniques,” Proceedings of the 1997 American Control Conference (Cat. No.97CH36041) [Preprint].
[4] El-Hoiydi, A. et al. (2003) “Poster abstract,” Proceedings of the first international conference on Embedded networked sensor systems - SenSys '03
 SİZİN DÜŞÜNCELERİNİZ?
SİZİN DÜŞÜNCELERİNİZ?
